
【导读】随着自动驾驶技术的发展,相关的毫米波雷达也得到了许多关注。毫米波雷达在自动驾驶领域,是与激光雷达LiDAR和摄像头一样极其重要的传感器。同时,我们将会看到,毫米波雷达除了在无人驾驶中的应用外,在机器人以及生物传感领域也有很大潜力。
自动驾驶为什么需要毫米波雷达
毫米波雷达在汽车领域其实已经有多年应用。汽车引入毫米波雷达最初主要是为了实现盲点监测和定距巡航,而随着技术的发展这两个特性也渐渐从高端车专用普及到了几乎所有车型。可以说汽车界对于毫米波雷达并不陌生,但是随着最近自动驾驶概念的走红,毫米波雷达在汽车领域的关注度获得了极大提升。
为什么自动驾驶需要毫米波雷达?众所周知,自动驾驶中与常规汽车中传感器最大的不同是加入了LiDAR和摄像头,LiDAR采用激光测距技术可以获得汽车周围空间的三维点云,实现环境建模;而摄像头则帮助自动驾驶系统实现场景的语义化分割和理解。举例来说,LiDAR可以检测到前方若干米处有一个标牌,而摄像头则可以帮助理解标牌上的内容,是限速标志还是和驾驶无关的广告等。
然而,LiDAR和摄像头都使用了光波段的电磁波,这个波段的电磁波有一个特点就是透射和绕射性能都不好,因此一旦有遮挡就很难使用。因此,在雨天、雾天等场合,LiDAR和摄像头几乎就无法工作了,这时候为了能自动驾驶必须依靠毫米波雷达。毫米波雷达与LiDAR最大不同的地方就是毫米波波段的电磁波不会受到雨、雾、灰尘等常见的环境因素影响,在这些场景下都能顺利工作,因此毫米波雷达可以说是自动驾驶稳定工作的重要保障。

毫米波雷达无论对于奥迪这样专注于L1-L3辅助驾驶的保守型车厂,还是对于Waymo,Uber这样想一步到位实现L4-L5的激进型自动驾驶初创公司都有很重要的意义。对于传统车厂来说,毫米波雷达在盲点监测、定距巡航等原应用上的一些渐进式扩展可以成为辅助驾驶(如自动换线)中的重要组成部分,而对于激进型自动驾驶初创公司来说高精度毫米波雷达则是其无人驾驶系统可靠性的重要保障,结合LiDAR和摄像头做传感器融合可以实现所有气候环境下的自动驾驶,因此如果没有毫米波雷达的话无人车恐怕都没法真正上路。
毫米波雷达芯片发展趋势
目前汽车领域的毫米波雷达主要基于FMCW技术,即发射出调频毫米波信号,并根据首发毫米波之间的频率差来确定目标的位置以及相对速度。FMCW雷达关注的指标主要是目标区分度和测量分辨率,其中目标区分度指的是雷达能分辨的两个物体之间的最小距离(如果两个物体之间的距离小于该最小距离则会被雷达认为是一个物体),而测量分辨率则是绝对距离的测量精确度。

我们看到的毫米波雷达的第一个趋势就是从24GHz频段演进到77GHz频段。根据美国FCC和欧洲ESTI的规划,24GHz的宽频段(21.65-26.65GHz)将在2022年过期,在之后汽车在24GHz能用的仅剩下24.05-24.25GHz范围的窄带频谱。反之,在77GHz频段,汽车雷达将能使用77-81GHz高达4GHz的带宽。对于FMCW雷达来说,频率扫描带宽决定了目标区分度和测量分辨率,因此77GHz的FMCW雷达对于24GHz来说目标区分度和测量分辨率都有十多倍的提升。此外,FMCW雷达的相对速度测量精度与载波频率有关,77GHz频段的速度测量精度会比24GHz要好数倍。最后,毫米波雷达系统的天线尺寸也随着载波频率上升而变小,所以77GHz波段的毫米波雷达系统尺寸会比24GHz更紧凑。
毫米波雷达走向77GHz频段也给芯片设计带来了挑战,随着工作频率的升高,发射功率、接收机噪声、锁相环噪声等指标都变得更难满足,同时在芯片封装中的寄生参数也更加敏感,因此对于芯片设计团队的技术水准提出了更高的要求。
第二个毫米波雷达芯片的重要趋势是CMOS工艺成为主流。毫米波电路传统的实现工艺是GaAs等III-V族工艺,但是III-V族工艺的成本过高,同时集成度低无法在芯片上集成数字模块,因此SiGe这样的工艺得到了不少应用。而随着CMOS工艺的特征尺寸不断缩小,在28nm节点之后CMOS工艺已经能基本胜任毫米波雷达的波段,因此毫米波雷达也就自然而然转向CMOS工艺。CMOS工艺除了成本低之外,另一个重要特性是能够集成数字电路,因此TI,NXP等在数字和模拟领域都有深厚积累的公司也就在他们的CMOS 77GHz雷达芯片中集成了MCU等额外数字模块,从而让雷达芯片的控制甚至数字信号处理能够在本地完成而无需再配备专用的处理器,这样就降低了系统复杂度和成本。
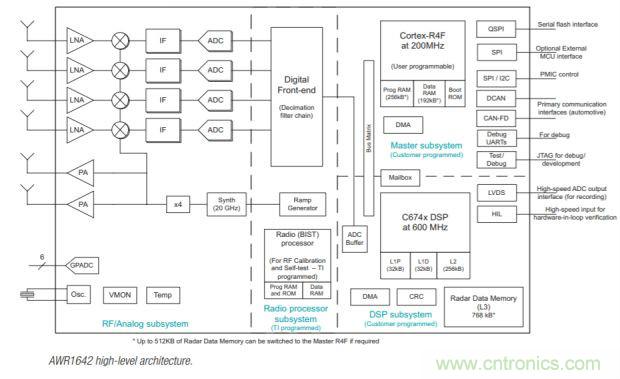
TI AWR1642 77GHz雷达芯片的架构图,其中除了雷达之外还包含了MCU以及DSP
第三个重要方向是毫米波雷达也在走向高分辨率。这里的分辨率不仅仅是目标测距的分辨率,更是指毫米波雷达的空间分辨率。盲点监测等传统汽车毫米波雷达应用只需要雷达监测在视野的一定距离中是否有物体即可,至于该物体是位于视野中的哪一个位置则并不关心。
在自动驾驶中则希望毫米波雷达能够得到视野中目标的具体空间位置,形成类似LiDAR这样的点云去做环境建模,甚至通过机器学习方法直接分析出雷达点云中每个点对应的具体物体(是车辆还是行人),因此需要高分辨率毫米波雷达。为了实现高分辨率,毫米波雷达系统因此往往需要使用波束成形或MIMO等技术。在波束成形和MIMO技术中,必须使用多路雷达收发机。
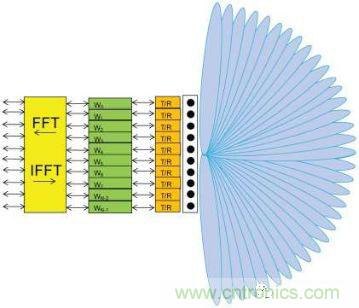
波束成形系统示意图,需要多路收发
为了提升波束成形和MIMO系统的方位精度,需要增加波束成形和MIMO系统中收发机的数量,因此目前在同一块芯片中尽可能增加集成的收发机的数量就成了另一个技术进化方向,例如TI的AWR1243集成了3发(射机)4(接)收(机),NXP的MR3003集成了3发4收,而中国的初创公司加特兰的Yosemite拥有4发8收。
最后必须指出的是,毫米波雷达在数字模块集成度和收发机数量集成度上的取舍事实上对应了两种不同的自动驾驶技术方向。对于主要针对辅助驾驶的传统车厂,其对于毫米波雷达的空间分辨率技术演化预期通常比较平稳,同时传统车厂对于成本和雷达模组复杂度等较为敏感,所以较合适的选择是更重视毫米波雷达上的数字模组集成度,能够集成MCU、DSP甚至一些AI加速模组等,从而能在雷达本地完成大部分信号处理以及一些AI相关处理,并降低总体模组的复杂度。
TI、NXP等半导体老牌公司主要面对的就是这类市场,因此我们可以看到TI和NXP在努力推进集成了MCU和/或DSP的毫米波雷达,而对于收发机集成度则并不激进。另一方面,L4-L5自动驾驶更重视的是毫米波雷达对于空间的分辨率以获取更高精度的点云,而对于毫米波雷达芯片上的数字模块并不非常在乎,因为毫米波雷达的点云最终都会送到自动驾驶系统中的高算力处理器上去做传感器融合,所以毫米波雷达芯片上是否有强大的数字处理能力并非关键。我们看到初创公司加特兰选择了在芯片上集成了更多收发机而非MCU/DSP(加特兰的4发8收雷达芯片的收发机数量比起TI的3发4收和NXP的3发4收更多),这也更对激进自动驾驶公司的胃口。
毫米波雷达的其他应用
毫米波雷达除了在汽车应用之外,还有其他领域也有广阔的应用前景。
目前除了汽车之外预计最早会落地的应用是工业机器人视觉。在机械臂等应用场合,机器人必须能快速感知距离和前方障碍物,并作出实时响应。这对于多机器人协作以及人机协作至关重要,否则机器人的安全性将无从得到保证。使用毫米波雷达的主要好处除了成本较LiDAR更低之外,就是其绕射透射能力强,可以non-line-of-sight完成感知,从而避免了诸多与视角有关的限制。目前,由于77GHz频段在美国和欧洲主要还是划拨给车载应用,因此工业机器人应用使用的波段以60GHz为主,TI也推出了相关芯片。
另一个重要的毫米波雷达应用是生理信号识别,主要是通过监测人呼吸过程中的身体细微起伏来实现。目前,欧洲和美国已经有计划要求在2022年之后的汽车中都加入车内生理信号识别系统,当车内只剩下儿童时将发出警报,从而避免发生车主把儿童遗忘在车内发生意外。
在这样的系统中,毫米波雷达将会成为感知系统的重要组成部分,因为传统的摄像头等传感器都很难感知到生理信号,而且在设计角度来看摄像头镜头必须裸露在外而且很难避免视野被遮挡,而毫米波雷达可以安装在塑料遮蔽物的后面且对于遮挡并不敏感,因此对于设计来说更友好。
车内生理信号识别将是未来毫米波雷达的一块增量市场,虽然现在具体频段还没有规定但是诸多半导体巨头已经在积极准备中。而当毫米波雷达在车载生理信号监测应用中得到验证后,将会有机会推广到医院和家庭的健康护理相关应用,这些进一步的应用值得我们期待。
推荐阅读:

