
【导读】伺服系统是工业自动化的重要组成部分,是自动化行业中实现精确定位、精准运动的必要途径。在结构组成方面,伺服系统由伺服驱动器、伺服电机、反馈装置(编码器)三大部分构成。按执行元件分为液压伺服系统、电气伺服系统和气动伺服系统,目前应用最为广泛的是电气伺服系统。
1、什么是工业机器人伺服系统?
伺服系统是工业自动化的重要组成部分,是自动化行业中实现精确定位、精准运动的必要途径。在结构组成方面,伺服系统由伺服驱动器、伺服电机、反馈装置(编码器)三大部分构成。按执行元件分为液压伺服系统、电气伺服系统和气动伺服系统,目前应用最为广泛的是电气伺服系统。
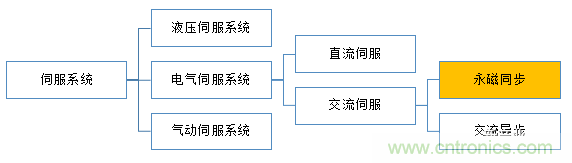
工业机器人伺服系统中,电机主要采用永磁同步交流伺服电机;伺服驱动主要以总线通讯形式实现对位置、速度和转矩单元的控制;编码器主要采用多圈绝对值编码器。
2、伺服系统市场概况
从市场情况来看,2018年交流伺服系统市场规模增速下滑明显,而工业机器人用伺服系统的需求规模逐年增加,且工业机器人专用伺服占交流伺服系统市场比重逐年上升。
GGII数据显示,2018年交流伺服系统市场规模69.42亿元,同比增速3.93%;其中,用于工业机器人领域的交流伺服系统,2014-2018年,市场规模从9.96亿元增至21.50亿元,占交流伺服系统总市场规模的比重从17.54%增长至30.97%。
工业机器人用伺服系统作为机器人重要的核心零部件之一,随着机器人市场前景看好,机器人用伺服系统将在交流伺服市场规模比重中逐渐上升。GGII预计,至2023年,机器人用伺服系统市场占比将提升至40%以上,市场规模达41.0亿元。
工业机器人用伺服系统市场规模及占比情况预测(单位:%,亿元)

数据来源:高工产研机器人研究所(GGII)
3、竞争格局
目前,工业机器人用伺服主要分为日系、欧系和国产三大类。
日系代表厂商主要有安川、三菱、山洋、松下、富士、多摩川等;
欧系代表厂商主要有西门子、施耐德、博世力士乐、ABB、科尔摩根等;
国产代表厂商主要有汇川、台达、埃斯顿、禾川、华数、翡叶动力、儒竟等。
一直以来,中国工业机器人伺服系统市场均由外资主导,外资厂商占据中高端的市场份额,国产份额虽逐年提升,但市场份额依然偏小。GGII统计数据显示,2018年国产工业机器人用伺服系统市场占比为22.34%,绝大部分市场份额仍由外资占据。
工业机器人用伺服国产市场份额(单位:%)
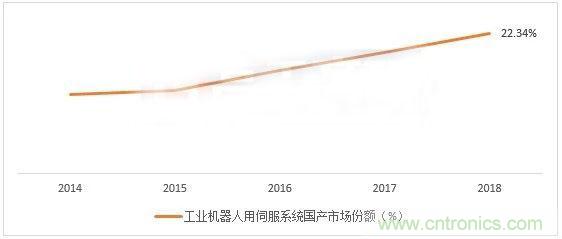
数据来源:高工产研机器人研究所(GGII)
4、技术对比
在产品尺寸方面,欧系产品强调高度集成化,体积较日系、国产的更小。
在动力输入方面,欧系伺服产品多以交流三相240V级别电压作为驱动系统的动力电源,且使用共直流母线技术;而日系和国产产品多以交流三相220V,且都属于单体独立型结构。
在动力输出方面,国产、日系、欧系伺服的输出功率大体相同;
在运动控制性能方面,西门子的产品具备2kHz的速度环频率响应能力,安川为1.5kHz,多摩川和汇川则都为1.2kHz。欧系产品优势更为明显,尤其在要求高速度和精度领域;日系伺服产品的稳定性较好,可以满足大部分应用领域的需求,尤其是小功率电机,性价比优势明显;国产伺服与外资尚存在一定的差距,主要体现在高低速防振动方面。
工业机器人伺服产品参数对比
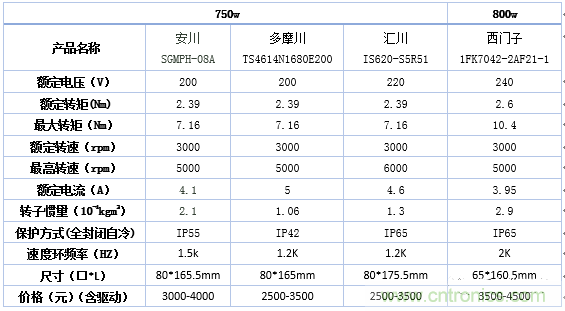
数据来源:公司产品手册 高工产研机器人研究所(GGII)整理
5、总结与研判
2018年年底工信部开展《工业强基工程重点产品、工艺“一条龙”应用计划》,其中,机器人用伺服系统作为应用项目选择之一,将有利于推动相关企业在伺服系统领域的研究及应用。
尽管国产伺服电机、驱动等取得了一定突破,但与外资尚存在一定的差距,主要体现在下游接受度与产品核心性能上,核心零部件的突破不是一朝一夕的事,从长远来看,伺服系统市场呈分层态势:外资依然占据并主导中高端市场,国产逐渐满足中低端市场需求,但向高端突破稍显乏力。
从市场的角度看,未来国产伺服系统市场接受度将逐步提高,市场份额也将逐年获提升。GGII预计到2023年,国产市场份额将突破40%。主要理由:
工业机器人本体市场国产化率逐步上升,给核心部件厂商带来机会。随着国内核心零部件技术水平的提升,产品使用性能日益提高,在要求不太苛刻的应用场合基本能满足本体企业客户的需求;此外,在满足产品性能要求的情况下,国产兼具价格优势,在成本提升与价格下行的双重压力下,国产本体厂商选择与国产零部件厂商合作的倾向越来越明显,以谋求企业的生存与发展。
如:埃夫特与翡叶动力达成战略合作伙伴关系;伯朗特向泰格运控采购5万台电机;欢颜长期向禾川、儒竞、合泰等采购伺服电机。
因此,在本体市场国产化率逐步提升的趋势下,国产本体头部企业长期稳定地采购国产零部件,对国产伺服品牌企业的成长具有较大的促进作用。
从技术的角度看,国产中短期内还将处于追赶的阶段,如目前提出的核心零部件机电一体化趋势,国内外头部企业纷纷开发机电一体化模块,如科尔摩根发布RGM机器人关节模组,高度集成了无框力矩电机,低压直流驱动器,专用谐波减速机,制动器,双反馈系统及热传感器等六大功能模块,实现一步到位的机器人关节解决方案。日本哈默纳科提出“整体运动控制”,将谐波减速器与电机、传感器等进行组合集成。
推荐阅读:

