
【导读】每辆汽车约由3 万个零组件所构成,整个汽车产业如同金字塔般,顶端为汽车制造商,在其下方则有无数的零件制造商。如何从大量的零件供应链找出最合适的产品并加以搭配组合,就是各家汽车制造商的独门绝活。
那么,被称为「在路上跑的超级电脑」的自驾车又是什么情况呢?如果将自驾车拆解,大家将会发现其中充满了各家新创企业的智慧结晶。
自驾车为了随时掌握周遭的状况,集结了各式各样的尖端科技在其中。而著手研究这些科技的企业除了汽车制造商与他们的协力厂商外,还有许多独自研发自驾科技的企业存在。例如美国的Zoox 和Nuro 就是个例子。
此篇内容着重在当今的未上市企业,但是并未包含所有的自驾车科技。分门别类来为各位介绍自驾车及新创企业,部分内容会有重叠。
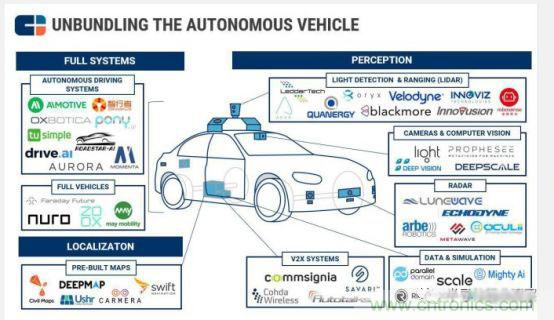
自驾车彻底剖析图片来源:CBINSIGHTS
物体的感知(perception)
自驾车除了需要辨识交通号志与标志外,其他车辆、自行车,还有行人等也都必须能够判别。也必须能够侦测朝着自车接近中的物体,及其距离和速度,以应付各种可能发生的状况。
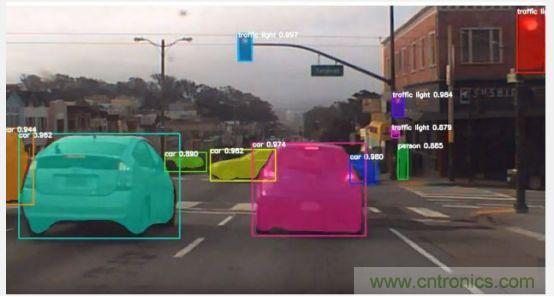
图片来源:CBINSIGHTS
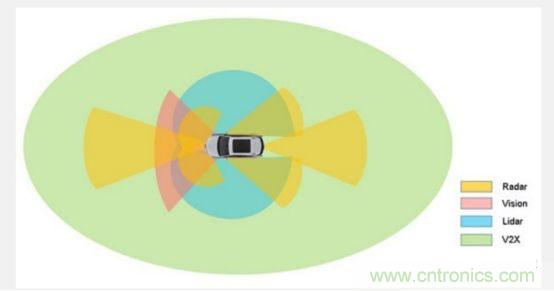
一般自驾车所使用的感测器不外乎就是摄影机、雷达、或光达(Lidar),而这些感测器各有其长处与短处。这些感测器所搜集到的数据透过「感测器融合」(sensor fusion) 这项技术来融合,尽可能的正确掌握车辆周遭环境。接下来,让我们来看看他们各自的特征在哪里。
首先我们来看摄像机。它广泛的使用在自驾车,与配备有先进驾驶辅助系统的车辆上。因为可以辨识颜色与字体,所以可以应用于交通标志、号志还有道路上标示的辨识。人的肉眼,可说不是它的对手。
许多新创企业为了开发出,能撷取更鲜明图像的摄像机,展开激烈的竞争。今年7月,在D轮募资获得1.21亿万美元的美国Light公司,就开发出能与光达的精度匹敌的摄像机。将16部摄像机所拍摄的图像结合,撷取出极为正确的3D图像。

使用16 颗镜头的Light 相机L16(图片来源:Light)
要处理摄像机撷取到的数据,需使用到电脑影像软件。辨识车道分隔线的颜色和类别,自驾车会判断出最适当的交通规则。
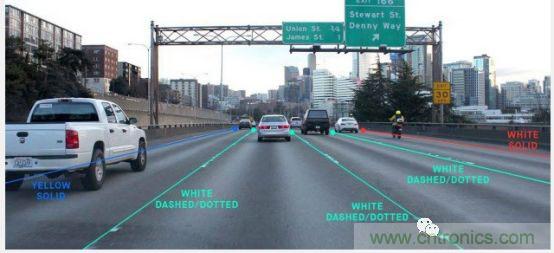
图片来源:CBINSIGHTS
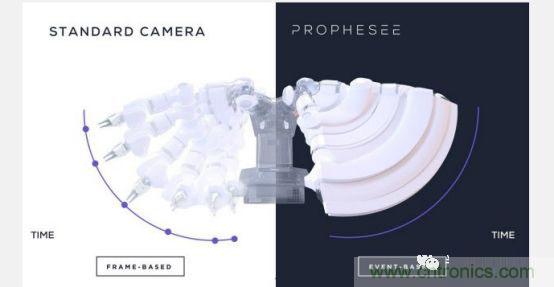
许多的新创企业正着手开发更高阶、更优良的电脑影像技术。例如美国DeepScale 等公司,为了提升辨识功能、减少误判率,正在研发深度神经网路。法国Prophesee 开发出,将不必要的数据减到最少,称为「事件驱动」的机器视觉技术。Prophesee 的深度学习技术,可将人脑处理视网膜捕捉到图像时的处理方法,以人工的方式重现。
标准的摄像机所装载的画格方式感测器,是同时经由每个画素记录下一祯图像,然后对每祯图像做处理。相对的,事件驱动型的感测器,则是因为画素彼此独立运作,将动作视为连续的情报流。与过去需要处理一连串图像的摄像机方式相较,可减少资料量。
Prophesee的机器视觉技术除了使用在自驾车上,也打算运用在工厂的自动化和医疗等产业。他们在2月的B轮追加轮取得1,900万美元。
通常自驾车为了提升摄像机的视觉机能,也会采取雷达与光达并用的方式。自驾车使用称为「感测器融合」(sensor fusion) 的软件,来融合感测器所搜集到的数据,运算出具连贯性的周遭环境图像。
除了这种视觉感测器外,许多的新创企业和汽车制造商也着手开发使用无线通信方式,让车辆与其他网路机器可以相互连接的「V2X」(vehicle-to-everything) 技术。
虽然这项技术还处于初期阶段,将来可望运用这项技术,将车上看不见的附近车辆、自行车与行人的即时影像传送到车上。
雷达的角色是利用发射出去的电波来检测接近中物体的距离与速度。可检测的距离长,比起使用旋转式零件的光达,信赖性也比较高。理由是目前用于光达的旋转式零件,误判的情形较多。也因为雷达的成本较低,因此被广泛使用。
美国Lunewave在9月时实施的种子轮融资,从德国BMW和中国的网路搜寻服务巨擘百度取得了500万美元。他们打算利用3D列表机来制作检测范围广、准确度高,且更为强大的天线。其技术的基础则是源自于1940年代由德国人开发出的龙伯球透镜。
美国Metawave 也正着手研发功能更强的雷达。他们使用超材料这项人工物质,来研发可以更迅速检测广范围的类比式天线。

Metawave在5月实施的追加种子轮融资(募资金额1,000万美元 )中,除了DENSO、丰田汽车、韩国现代汽车几家大厂外,美国创投公司Khosla Ventures也在行列之中。Metawave在8月时,对外指出,德国半导体巨擘英飞凌也有出资。
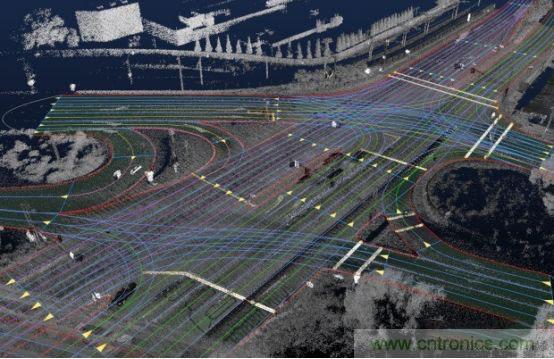
光达被认为是最尖端的感测器。其精度之高,可以绘制出车辆周遭的3D 图像,能用于物体的检测。

光达技术绘制出的车辆周遭3D 图(图片来源:Velodyne LiDAR)
光达使用红外线感测器来判断物体的距离,其原理是将雷射光的脉冲高速射出,计算测量光线反射回来的时间。
过去的光达元件为了全方位捕捉车辆的周围环境,使用了许多的旋转式零组件。这类组件通常成本高昂,多数情况下其可信度都比固定式零组件来的低。因此各家公司都朝着维持光达感测器精准度,并降低制造成本的方向努力。
解决方法之一,是使用半导体技术或光学技术的「固态型」光达元件来取代过去的机械部分。不需使用旋转式零件,装设成本也低。
以色列的新兴企业Innoviz已开发出,可将价格压低到数百美元的固态型光达。和美国Velodyne LiDAR的,使用128颗雷达,价格高达7.5万美元的产品相比,Innoviz的产品价格更显得微不足道。
Innoviz 在4 月时对外表示,他们将与BMW 还有加拿大的零件制造商麦格纳国际(Magna International Inc.) 合作,将自家光达产品装载在BMW 的自驾车上。

Innoviz 的光达元件 InnovizPro (图片来源:Innoviz)
美国Aeva也正着手开发固态型光达。在10月的A轮融资获得4,500万美元的挹注。根据Aeva的说法,他们的光达可侦测的范围达到半径200公尺,且价格也只要200 ~ 300 美元。使用的技术也非过去在光达上所采用的脉冲方式,而是射出连续波光。
中国的速腾聚创(Robosense)也正进行固态型光达的研发。在10月实施的C轮融资,创下了中国光达企业单轮融资额最高纪录,达4,330万美元。而参与这轮融资的企业有,阿里巴巴集团的物流部门菜鸟网络,汽车制造商的上海汽车集团与北京汽车集团。
V2X 技术,让车辆与网路机器之间的无线通信成为可能。虽然目前还在初期阶段,未来可望补强目前光达、雷达或是摄像机等视觉感测器的弱点。
V2X 感测器可以检测出路上的障碍物、交通堵塞还有不断接近中的死角。
以色列的初创企业Autotalks 与现代汽车合作,着手V2X 感测器技术的量产化。而韩国的三星电子,也有对Autotalks 出资。
驾驶人的数据、模拟
对于开发自驾车技术而言,实际在道路上进行实车测试和模拟是不可或缺的。透过测试与模拟,来训练指示车辆行驶的演算法。
美国兰德公司(RAND Corporation) 指出,为了证明自驾车的安全性,必须实施数亿~ 数十亿英哩的行车测试。实验车辆为了取得这么多里程的数据,需要花费数年的时间。因此,各家公司利用模拟的方式,来争取时间。
着手研发模拟器的新创企业与开发自驾车的企业们,灵活运用人工智慧(AI) 来制作及改良,用于训练自驾车的简易资料集(data set)。刺眼烈日下,或从停车中的车辆后头突然窜出的行人等,在训练自驾车如何应变这些危险却不常发生的状况时,特别有用。
以色列的新创企业Cognata 正在研发,提供自驾车在进行实验时使用的各式场景的3D 模拟系统。

Cognata 的3D 模拟系统
Cognata在10月实施的B轮融资时,从欧洲的空中巴士、以色列的创投Maniv Mobility等募得1,850万美元。
美国半导体大厂nVidia 在模拟器这个领域,是走在最前面的几家大企业之一。在5 月时,发表了运用云端技术的模拟系统「Drive Constellation」。这个系统搭载了该公司的影像处理器(GPU),运算并产生让自驾系统处理的感测器数据。nVidia 可提供在数十亿英哩的特别场景中,训练自动驾驶的演算法。
nVidia 在9 月时,将这项系统公开给Cognata、美国Parallel Domain、德国西门子等合作对象。
收集驾驶人数据时会产生的另一项课题就是「影像注解」(image annotation)。指的是,为了让自驾车可以认识及辨识物体,在数据上作注解。
正研发产生学习用数据的美国初创企业MightyAI,正与开发电脑视觉模型的企业一起着手,将注解附加在用于该公司系统的训练用数据。MightyAI 着手中的还有数据管理、注解(annotation) 与妥当性检证工具。
MightyAI 在赋予意义给收集到的数据的技巧之一,是将动画以画素单位来分割,能够细致的处理图像的「影像分割(image segmentation)」技术。

百度也为了该公司自驾车使用的数据集,正在研发名为「ApolloScape」的影像分割软件。
「ApolloScape」 可以将车辆、行人、自行车、大楼、路灯等,最多26 种的图像给予定义,让自驾车认识可以行驶的区域,还有辨识接近中的障碍物。
定位(自身车辆的位置)
自驾车为了下判断,或是规划行车路径,必须先正确掌握自己的位置。
一般都是使用GPS 的讯号来判断,然而通常会有1~2 公尺的误差。以一般道路平均宽度1.2 公尺来看,这样的误差距离其实过大。
因此,各家厂商运用现成的地图或是科技,将误差值降到1 公尺以内。
自驾车在行走中,会将周围的状况与保存在车上记忆体内的数位地图做比对。
这种高解析度地图,比起一般导航软件用的数位地图要精准上许多。车道的宽度、行人穿越道、道路标志等等,各种道路情报极为丰富。还有车子外部感测器收集到的数据,让机能更为强化。
许多的新创企业,也都着手研发制作数位地图时所需的硬件(感测器等) 和软件。
美国DeepMap 开发了制作地图所需的软件,打算将这个软件的授权卖给汽车制造商,或是开发自驾车技术的科技产业。该公司在8 月时,自德国博世(Bosch) 取得资金。在那之前,也获得美国创投公司Andreessen Horowitz 与Accel Partners 的资金。

美国Civil Maps 也开发针对完全自驾车市场,开发3D 地图的制作技术。将感测器收集到的原始数据,运用AI 技术,在地图情报上加工。
也有企业是为了贩售资料,着手开发高解析度地图。
在Mapping 这个产业里,有美国的HERE Maps 和荷兰的TomTom 两大公司。Here Maps 在2015 年12 月时,被德国的汽车公司联盟(Audi, BMW, Daimler) 买下。TomTom 则是为了将他们所拥有的欧美地图,与百度所拥有中国地图做整合,于今年1 月与百度建立合作关系。
美国的Google 公司,在这个领域也有卓越的进步。瑞典的富豪汽车在10 月时,也表明地图系统将由TomTom 改成Google 的方针。Google 的自驾部门Waymo,也利用在实验及验证时取得的数据,开发独自的高解析度地图。
百度正在开发自驾车用软件「Apollo」所使用的高解析度地图。打算将这个地图卖给汽车制造商来收取服务费,或是将地图的使用费用含在车价内,借以获取收益。百度的高解析度地图事业,有朝一日可望会超越他们目前在中国最大的搜寻引擎事业。
系统
不针对特定零组件,而是著手研发整套自驾系统的企业也有很多。
这些企业大多数都是特别强化自动驾驶技术,与汽车制造商一同携手研发。此外,有极少数的企业选择包含车体在内的全车研发。
自驾系统
多数进行全系统研发的企业,把电脑影像与感测器融合软件,及自动驾驶所需硬件成套贩售。这种类型的系统,就如同汽车的头脑一样。
通常在这个领域的新创企业,会与汽车制造商合作,并展开独自的技术。部份情况下,事后在车上加装自驾车技术也是有可能的。
例如,美国的Drive.ai , 就有着手开发活用该公司自驾系统软件的改装套件。在德州的Frisco 进行数个月的实际测试后,在10 月时,这项服务也扩大到德州的Arlington。
Drive.ai 在2017 年9 月,与美国大型共乘服务公司Lyft 合作。将他们的自驾系统置入Lyft 的开放原始码软件中,共同研发出自驾车。

中国企业也正进行自驾系统的开发
研发据点设在北京的Momenta (初速度科技)于10月时,在C轮募资从电动车制造商NIO 、腾讯获得资金挹注,成为独角兽新创公司(估值超过10亿美元的未上市公司)。Momenta与苏州市合作,展开大规模的实车测试,并且在苏州市里建构智慧交通系统。
Pony.ai(小马智行)也是另一个独角兽公司。他们为了展开自驾系统研发,与中国第二大汽车公司,广州汽车合作。在A轮募资取得1亿200万美元的资金后,仅在3个月后的9月时,在广州成功展开自驾车的测试。
车体也是自行研发
Zoox、Nuro,这类公司则是进行自驾车的整车研发。
Zoox 的概念车与传统的汽车不同,没有方向盘与仪表板,车内采长型座椅面对面的配置方式。

oox 还未取得道路行驶许可,目前使用TOYOTA 的大型休旅车Highlander 来进行技术上的测试。
Zoox的特殊设计抓住了投资人的目光,也因共同创办人兼CEO的闪电卸任,媒体曝光率也很高。
Zoox在7月的B轮募资时,企业价值被估计为32亿美元,募得了5亿美元。累计募资额达到8亿美元。计划在2020年时,展开自驾车载客服务。

Nuro 的自驾车被设计为载货专用,解决让零售业者头痛的最后一哩商品配送问题。
推荐阅读:

