
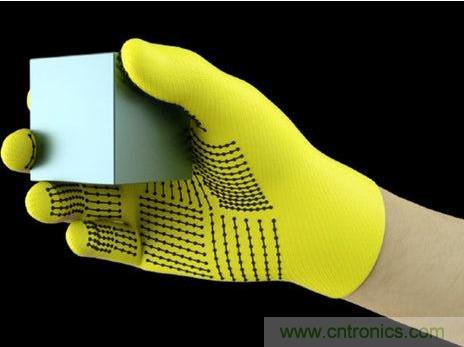
【导读】麻省理工学院计算机科学与人工智能实验室(MIT-CSAIL)的研究人员近日开发了一种低成本的传感器手套,旨在使人工智能能够“弄清楚”人类如何通过触摸识别物体。它被称为可伸缩的TActile手套(STAG),使用550个微小的压力传感器来生成可用于创建改进的机械手的模式。
人类非常善于通过触摸来弄清楚物体是什么(例如在黑暗中摸索眼镜或手机)。工程师希望机器人也能效仿这种能力。这样做的一种方法是收集尽可能多的关于人类实际上如何通过触摸识别的信息。原因在于,如果有足够大的数据库,那么机器学习可以用来进行分析,不仅可以推断人手如何识别某物,还可以估计其重量 - 机器人和假肢难以做到这点。
麻省理工学院正在通过配备550个压力传感器的低成本针织手套收集这些数据。手套连接到计算机,计算机收集数据,压力测量结果被转换为视频“触觉地图”并被输入卷积神经网络(CNN)。该网络能对图像进行分类,找出特定的压力模式并将其与特定的物体相匹配。
该团队从26个常见物体(如饮料罐、剪刀、网球、勺子、钢笔和马克杯)中收集了135,000个视频帧。然后,神经网络将半随机帧与特定的夹点相匹配,直到建立了一个物体的完整图片 - 这与人们通过在手中滚动物体来识别物体的方式非常相似。通过使用半随机图像,可以给网络提供相关的图像集群,因此不会在无关数据上浪费时间。
“我们希望最大化框架之间的差异,为我们的网络提供最好的输入,”CSAIL 博士后Petr Kellnhofer说。“单个群集中的所有帧都应该具有类似的签名,这些签名代表了抓取对象的类似方式。从多个群集中采样模拟人类交互式尝试探索物体时找到不同的抓取方式。”

该系统目前识别物体的精确度为76%,其还可以帮助研究人员了解手掌握和操纵它们的方式。为了估计重量,研究人员还编制了一个11,600帧的单独数据库,显示在跌落之前用手指和拇指拾取物体。通过在物体被保持时测量手周围的压力,然后在跌落后比较它,可以测量重量。
该系统的另一个优点是成本和灵敏度。类似的传感器手套价值数千美元,却只有50个传感器。而麻省理工学院的手套则采用现成的材料,成本仅为10美元。该研究发表在《自然》杂志上。
推荐阅读:

